Release Notes IDS peak 2.10
Introduction
These release notes describe the changes in IDS peak 2.10, which introduces the reconnect feature for USB3 Vision cameras. Additionally, you can download the Python bindings for IDS peak via PyPI. For the Windows setup, you can choose between different variants.
IDS peak 2.10
New and changed functions
Reconnect for USB3 Vision cameras
The reconnect feature was introduced for GigE Vision cameras with IDS peak 2.7. From IDS peak 2.10 on, the reconnect feature is also available for USB3 Vision cameras (U3 models). If the physical connection has been interrupted, the camera is automatically reopened. If a preset UserSet is loaded when the camera starts up, the previous status of the camera is also restored.
| Reconnect | Restore image acquisition |
Restore parameters | |||
| enable | disable | via UserSet | automatic | ||
|
GigE Vision Transport Layer |
|||||
| GigE Vision Transport Layer Kernel (GEVK) |
|||||
| USB3 Vision Transport Layer (Windows - U3VK) |
|||||
|
USB3 Vision Transport Layer |
|||||
| uEye Transport Layer | |||||
| IDS peak Cockpit | |||||
| IDS peak genericC++ | |||||
| IDS peak genericC# | |||||
| IDS peak genericPython | |||||
| IDS peak comfortC | |||||
Change of the Windows setup
From version 2.10 on, the IDS peak setup is available for Windows 64-bit in different variants:
- IDS peak standard setup: This setup has the same scope as in the previous version. You can use the uEye Transport Layer to operate uEye cameras (UI models) if you have installed the IDS Software Suite.
- IDS peak runtime setup: This is a greatly reduced setup, which only contains drivers without a development environment or IDS peak Cockpit. You can use the uEye Transport Layer to operate uEye cameras (UI models) if you have installed the IDS Software Suite.
- IDS peak extended setup: This setup also contains the uEye camera drivers for UI models. With this setup, you can use UI camera models without the additional installation of the IDS Software Suite. The setup also includes the IDS Camera Manager, which you can use to configure the IP addresses of the GigE uEye cameras (UI-5xxx), for example.
Note that this setup automatically uninstalls an existing version of the IDS Software Suite.
The following overview shows you which components are included in the individual setup variants.
| 64-bit system architecture | 32-bit system architecture | |||
| IDS peak runtime setup | IDS peak standard setup | IDS peak extended setup | IDS peak standard setup | |
| USB3 Vision camera drivers | ||||
| GigE Vision camera drivers | ||||
| uEye camera drivers | ||||
| U3VK Vision Transport Layer | ||||
| GEV Transport Layer | ||||
| GEVK Transport Layer | ||||
| uEye Transport Layer | ||||
| IDS peak Cockpit | ||||
| Command line tools | ||||
| IDS Camera Manager (for UI models) | ||||
| Development environment: libraries | ||||
| Development environment: examples | ||||
| Interface: DirectShow | ||||
Python bindings via PyPI
You can now install the Python bindings for IDS peak directly via PyPI. The bindings include their direct runtime dependencies except for the camera drivers and transport layers. The indirect dependencies are resolved via the package requirements. This means that if you use the Python bindings, you must install the IDS peak camera drivers and transport layers in addition to the bindings themselves. Therefore, the IDS peak runtime setup is sufficient under Windows. Under Linux, you must use pip version 20.3 or higher in addition to IDS peak.
IDS peak Cockpit
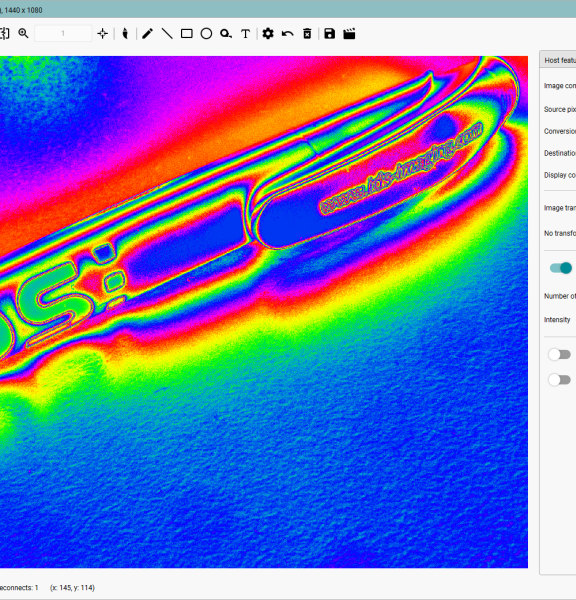
You can enable a pseudo colour display in the “Host features” dialog.You can use a pseudo colour display to increase the contrast in a grey-scale image, for example. To use the pseudo colour display, you must use a destination pixel format that has only one channel (Mono8, BayerRG8, etc.). Optionally, you can save the pseudo colour image directly in IDS peak Cockpit.

IDS peak genericSDK
- The “BufferToImage” function was added in C# to create an image from a buffer using the IDS peak IPL.
- You can now install the Python bindings directly via PyPI.
IDS peak IPL (Image Processing Library)
- Support for certain types of TIFF images was implemented in the IDS peak IPL.
- Supported pixel formats: Mono8, Mono10, Mono12, RGB8, RGB10, RGB12
- Colour spaces: RGB and black as zero
- Support for 8- and 16-bit per sample (10- and 12-bit are supported by the "TIFFTAG_BITSPERSAMPLE" tag)
- Limitations: only one layer, only stripe-based images, no compression, no BigTIFF support, no alpha channels, no packed formats
- You can now install the Python bindings directly via PyPI.
IDS peak AFL (Auto Feature Library)
- You can now install the Python bindings directly via PyPI.
GEV Transport Layer / U3V Transport Layer
As announced in the IDS peak 2.6 release notes, IDS peak 2.10 changes the default mode of LossHandlingMode from "Limited" to "Unlimited". If you still want to use “Limited”, you can change this setting in LossHandlingMode. For more information on the different modes of LossHandlingMode, please refer to the IDS peak manual.
uEye Transport Layer
Additional features have been added to the uEye Transport Layer to enhance the operation of uEye cameras (UI models) under IDS peak:
- You can use LineInverter to invert the signals of output lines.
General improvements
- An issue was fixed in the IDS peak Cockpit that caused a broken image to be displayed after the image size was changed.
- Under Python, an issue was fixed concerning the update of the camera firmware.
- In the Python programming examples “record_video_and_change_parameter” and “start_stop_acquisition_software_trigger”, an issue was fixed that an exception occurred when more than one camera was connected.
- The “host_auto_features_live_qtwidgets” programming example was revised and improved.
- In the uEye Transport Layer, errors in the I2C features were fixed concerning reading or writing via I2C as well as image acquisition.
Component versions used in IDS peak 2.10
| Component | Version Windows | Version Linux |
| IDS peak comfortAPI | 1.7.0.0 | 1.7.0.0 |
| IDS peak genericAPI | 1.8.0.0 | 1.8.0.0 |
| IDS peak IPL | 1.12.0.0 | 1.12.0.0 |
| IDS peak AFL | 1.5.0.0 | 1.5.0.0 |
| IDS peak Cockpit | 1.11.0.0 | 1.11.0.0 |
| Tool Device Command | 1.4.4.0 | 1.4.4.0 |
| Tool Device Update | 1.4.5.0 | 1.4.5.0 |
| Tool IP Config | 1.4.4.0 | 1.4.4.0 |
| Tool Device Password | 1.0.2.0 | 1.0.2.0 |
| Support Tool | 1.1.0.0 | 1.1.0.0 |
| DirectShow | 0.1.0.0 | - |
| GenTL GigE Vision user space | 1.17.0.0 | 1.17.0.0 |
| GenTL GigE Vision kernel | 1.17.0.0 | - |
| GigE Vision kernel driver (WHQL) | 1.6.0.0 | - |
| GenTL USB3 Vision user space | - | 1.17.0.0 |
| GenTL USB3 Vision kernel | 1.17.0.0 | - |
| USB3 Vision kernel driver (WHQL) | 1.6.0.0 | - |
| GenTL uEye (uEye Transport Layer) | 1.17.0.0 | 1.17.0.0 |
| GenICam | 3.4.1.1 | 3.4.1.1 |
Status: 2024-06-10